В последние годы вновь активизировались дискуссии по поводу исследований Марса. Обострению интереса к Марсу способствовал очевидный успех научной миссии двух американских марсоходов. Вместе с тем, за рамки академических вышли споры о перспективах и направлениях дальнейшего освоения космоса ведущих космических держав. Подвергаются корректировке долгосрочные программы космических исследований, активно включаются в «космическую гонку» новые субъекты (Китай).
Есть основания полагать, что космическая экспансия человечества подходит к «точке бифуркации» и следует однозначно определиться по концептуальным проблемам освоения космоса. Исходя из самого глубокого осмысления бытия, емко сформулированного в тезисе основоположника космонавтики К.Э. Циолковского: «Земля это колыбель человечества, но нельзя же вечно жить в колыбели», можно сделать заключение, что досужие рассуждения о «неактуальности пилотируемой космонавтики», «со всеми задачами лучше и с меньшими затратами справятся автоматы» - несостоятельны. Подобные рассуждения имеют определенный смысл, если ограничить космическую активность получением научной информации о космической среде и объектах Солнечной системы. Однако такой «информационный фетишизм» ограничивает мотивацию космической активности, минимизирует стимулы, выводит за рамки социального детерминизма в контексте Глобальных проблем.
Вся космическая активность, в таком случае, отрывается от фундаментальных проблем человечества, сводится к нездоровому академизму и, практически неизбежно, обречена на стагнацию. Имеет место и другая крайность в концепциях и программах освоения космоса. Ее можно условно назвать манифестационным подходом. Преобладание манифестационно - спортивного инфантилизма в мотивации космической активности имело место (и было оправдано) на самых первых этапах освоения космоса в условиях конкуренции двух сверхдержав. В современных условиях, планировать сверхвысокозатратную и сравнительно опасную пилотируемую экспедицию на другую планету с целью вывесить там первыми флаг, а потом убраться оттуда без дальнейших четких перспектив - задача для мечтателей с авантюрно- экстремальным уклоном (невыполнимая кстати), но не для серьезных организаций, использующих деньги налогоплательщиков.
Стратигема освоения космоса должна учитывать перспективу колонизации Солнечной системы в духе идей Циолковского, в сопряжении с основополагающими интересами всего человечества, в контексте основных Глобальных проблем.
Отсюда непреложное требование при планировании пилотируемых экспедиций на Марс. Каждая такая экспедиция (начиная с самой первой) должна подразумевать продолжение с перспективой образования вначале пионерной постоянной базы, а в дальнейшем ее расширение до автономной колонии с полным циклом производства необходимых продуктов, конструкций и агрегатов из местного сырья. Следовательно, применимы только такие технические решения, которые вписываются в означенную стратигему.Императивами, определяющими стратегию освоения Марса должны быть надежность и безопасность. Действительно, ждать оперативной помощи в случае экстремальной ситуации - не приходится.
Определившись со стратегией и императивами можно приступать к выбору технических решений, способов и средств, позволяющих решать поставленную задачу. Следует отметить еще одно концептуально слабое место, имеющееся в программах исследования Марса а, следовательно, предлагающиеся не самые эффективные и небезопасные технические решения. Речь идет об ограничениях накладываемых современными и близкоперспективными средствами вывода полезных грузов на околоземные орбиты. Отсутствие качественного прогресса в средствах вывода (в последние десятилетия) ошибочно трактуется как «принципиальная невозможность» реализации качественного скачка в увеличении массоразмеров выводимых грузов в сочетании с многократным уменьшением удельной стоимости вывода грузов.
На самом деле - такие возможности есть (см. российский патент № 2134650). Поскольку, просматривается перспектива качественного увеличения эффективности систем вывода, попытки уложить технические решения марсианской программы в «прокрустово ложе» существующих массоразмерных ограничений (в ущерб безопасности и эффективности) - контрпродуктивны.
Представляется полезным, отодвинуть жесткие массоразмерные и ценовые ограничения и рассмотреть технические средства по исследованию и освоению Марса с позиции максимальной эффективности по выполнению стратегической задачи в сочетании с достаточной безопасностью и комфортом для персонала экспедиций, и только в последующем окончательно соизмерить с возможностями по цене и массоразмерам. В процессе принятия окончательного варианта следует решить - можно ли от чего-то отказаться без ущерба безопасности и эффективности. Квалифицированный окончательный анализ позволит (ко всему прочему) вынести окончательный вердикт о реализуемости в обозримую перспективу широкомасштабного освоения (колонизации) космоса.
Предлагаемый методологический подход расширяет рамки изобретательского и конструкторского творчества. В то же время, неприемлема другая крайность - отрыв от учета реалий осваиваемой планеты, игнорирование фундаментальных ограничений, физических закономерностей.
Программа широкомасштабного освоения Марса должна опираться на систему взаимоувязанных технических решений, группируемых в следующие основные блоки: 1. Средства вывода полезных грузов на орбиту Земли.
2. Пилотируемые комплексы на маршруте: орбита Земли - орбита Марса - орбита – Земли.
3. Пилотируемые посадочно - выводящие средства на маршруте: орбита Марса - Марс - орбита Марса.
4. Грузовые посадочные средства на маршруте: орбита Марса – Марс.
5. Пилотируемые посадочные средства на маршруте: орбита Земли - Земля.
6. Жилые марсианские модули.
7. Переходные модули и шлюзы.
8. Вспомогательные инженерные сооружения и конструкции для Марса.
9. Ядерные энергетические установки для Марса.
10. Солнечные (дополняющие) энергетические установки для Марса.
11. Компактные трансформирующиеся оранжереи для Марса.
12. Автоматические модули-заводы по производству конструкций и жизненно - важных расходуемых материалов из местного сырья.
13. Системы жизнеобеспечения марсианских жилых комплексов на марсианских производственных базах, обитаемых научных станциях, колониях.
14. Системы связи адаптированные к марсианским условиям.
15. Приборное оснащение для всесторонних исследований Марса.
16. Координатная спутниковая группировка (аналог GPS или ГЛОНАСС) для Марса.
17. Спутниковая группировка ареаграфического мониторинга Марса.
18. Кибернетические устройства (робототехника) для Марса;
19. Марсианские скафандры.
20. Беспилотные аэростатические и авиаразведывательные аппараты различного
радиуса действия.
21. Грузовые автотранспортные средства (электромобили) для Марса.
22. Экспедиционные пилотируемые автотранспортные средства для Марса.
23. Системы аварийного спасения и безопасности в марсианских условиях.
Таков далеко не полный перечень основных направлений разработок и изобретений по марсианской тематике по которым надо работать, если принять концепцию широкомасштабного освоения (колонизацию) Марса. Следует заметить, что у автора настоящей статьи имеются многочисленные наработки по большинству обозначенных направлений.
Собственно эти идеи сформулированы и были проработаны автором еще в 70-80 гг. Уже тогда появились и более «продвинутые» идеи комплексного освоения Солнечной системы с опорой на: «кибернетическую реплицирующую квазиорганическую субстанцию» (см. нанотехнологии в современной трактовке), «инерционный термоядерный синтез» (см. патент № 2125303), «магнитоплазменный способ вывода полезных грузов на геостационарную орбиту» (см. патент № 2134650), «большая космическая колония» (см. книгу В.А. Золотухина «Колонизация космоса: проблемы и перспективы», Тюмень, ТГУ, 2003 г.( изд. 2-е).
Автор счел полезным пропагандировать более прогрессивные технические решения, положив наработки по Марсу «под сукно». Ввиду того, что комплексное решение проблем колонизации космоса, мягко выражаясь, задерживается (возможно, идеи опередили свое время), в то же время резко оживились дискуссии по Марсианской проблематике, имеет смысл «реанимировать» часть наработок.
К данному решению подтолкнул анализ последних публикаций в открытой печати. Технические решения, заложенные, и в российскую, и в американскую концепции исследования и освоения Марса - не впечатляют.
Так-так количество и объем наработок по марсианской тематике очень велики, в рамках настоящей статьи ограничимся рассмотрением экспедиционного пилотируемого автотранспортного средства. Рассмотрим: его конструкцию, оснащение, условия эксплуатации, выполняемые задачи, сопутствующие и сопровождающие технические средства. Так и назовем его пилотируемымэкспедиционным марсоходом (ПЭМ).
Прежде чем предлагать технические решения следует определиться с тем, какие задачи будет решать данное транспортное средство и в каком организационно-техническом контексте действовать. Основная сфера применения ПЭМов - длительные экспедиции (порядка 1-го месяца в автономном штатном режиме) комплексного исследования Марса с особым упором на поисковые и геологоразведочные работы. Главной целью геологоразведки Марса является поиск месторождений ценного сырья для местного (марсианского) производства необходимой продукции.
Вблизи выявленных месторождений, в дальнейшем, разместятся модульные автоматизированные производственные комплексы. Особо благоприятное сочетание месторождений явится основанием для размещения первоначальной научно-производственной базы с последующим развитием в постоянно-обитаемую колонию.
Любопытно то, что наибольшей значимостью в условиях Марса будет обладать мерзлая вода. Можно прогнозировать, что первые колонии будут размещены: либо вблизи ледяных полярных шапок, либо над мощными слоями марсианской вечной мерзлоты. Длительную марсианскую экспедицию будет предварять детальное спутниковое картографирование с разрешением до нескольких десятков метров в горизонтальной плоскости и построением трехмерной компьютерной модели поверхности Марса.
Вдоль выбранного маршрута должна проводиться дополнительная спутниковая съемка с 1-2 порядка лучшим разрешением и оперативно передаваться в избранном радиодиапазоне на компьютер ПЭМа. Таким образом будут минимизированы различные неприятные и опасные сюрпризы. Кроме того на ПЭМе должен базироваться как минимум один радиоуправляемый минисамолет-разведчик с телекамерой высокой четкости. Самолет-разведчик будет запускаться, в отдельных случаях, для детальной проверки маршрута и отличается от ныне существующих военных прототипов крайне облегченной конструкцией и прменением электродвигателя с питанием от аккумулятора. В эксплуатации самолета должно быть предусмотрено многократное применение с парашютно финишного спуска, с подъемом манипулятором ПЭМа (или приданным ПЭМу кибером с последующей доставкой на ПЭМ) и подзарядкой аккумулятора минисамолета.
Допустима и полезна трансформация минисамолета (сложение крыльев) для компактного размещения на борту ПЭМа. Кроме минисамолета-разведчика для дистанционного видиозондирования на борту ПЭМа следует применить ракетно-аэростатическую видеосистему (РАВС). Функционировать она будет следующим образом. На внешней поверхности ПЭМа устанавливается пусковая аппарель на турели. Внутри контейнера на аппарели размещается небольшая ракета (1-2 кг массы) ракета имеет твердотопливный отделяемый разгонный блок, баллон сжатого гелия, сверхлегкий надувной баллон, телекамеру, радиоприемопередатчик, блок управления (телекамерой и дозированным стравливанием гелия - для поддержания оптимальной высоты полета).
Эксплуатироваться РАВСы будут так. В случае крайней необходимости оперативной съемки на удалении до нескольких км., аппарель наводится на соответствующую точку в проекции которой на поверхность Марса находится интересующий участок. Далее, запускается ракета, выводится приборный блок в заданную точку, разгонный блок отсоединяется, гасится кинетическая энергия парашютированием выпущенного пневмобаллона. Вначале он срабатывает как парашют. Затем парашют- баллон надувается гелием, зависает над заданным участком и ведет телевизионную съемку. Можно дополнить рассматриваемую операцию использованием осветительных ракет (в ночное время). Можно также предусмотреть телесъемку в инфракрасном или ином диапазоне. Недостаток данной системы - одноразовое использование каждого РАВСа. На борту ПЭМа должно быть запасено более десятка РАВСов. Выводиться на аппарель они должны автоматизировано. Для обеспечения безопасности передвижения ПЭМа по поверхности Марса рекомендуется использование лидера. Лидер представляет собой небольшое транспортное средство, следующее на небольшом удалении (30-150 м) впереди ПЭМа. Конструктивно лидер выполняется в виде полуавтоматического 4-х колесного шасси с удельным давлением колес на грунт соответствующим удельному давлению ПЭМа. Управляется лидер из кабины ПЭМа методом дистанционного управления. Во время движения управлением движения в ПЭМе одновременно заняты два водителя. Один из них управляет ПЭМом, другой лидером. Причем, функции каждого водителя могут взаимозаменяться без смены места водителя. Оба места водителя полностью оснащаются для обеих функций (управлением ПЭМом и управлением лидером).
В частности, должны быть предусмотрены 2 ЖК монитора высокой четкости (не менее 2 млн. пикселей), передающих изображение с видеокамер лидера. Изображение на мониторы может поступать и с других камер, установленных на борту и по периметру ПЭМа, а также с разведывательного минисамолета и РАВСов. Каждому водителю в комплекте прилагается шлем (очки) виртуальной реальности (бинокулярное восприятие окружающей обстановки). Соответственно, на лидере должен быть парный комплект видеокамер управляемых сенсорами на шлеме водителя.
Кроме того, на лидере следует установить следующее оборудование и агрегаты:
- аккумуляторы для автономного функционирования лидера;
- вибратор и сонар микросейсмозодирования (на ходу);
- ультрозвуковой излучатель и ультразвуковой сонар (мониторинг структуры
- почвы);
- портативный лазерный спектрограф (прототип на станции «Фобос»)
- два манипулятора, оснащенных сменяемым инструментом;
- емкость с набором контейнеров для сбора образцов грунта;
- четыре спецколеса - движителя, оснащенных электромоторами постоянного тока с возможностью прямого и обратного вращения (реверс);
- управляющий компьютер;
- электромагнитные системы управления движением;
- четыре выдвижных и развертываемых кресла для обеспечения возможного передвижения с пассажирами в режиме прямого ручного управления.
Для приема и передачи информации (видео и прочей) от лидера к ПЭМу и от ПЭМа к лидеру должна быть обеспечена надежная связь. Рекомендуются использовать оптикооволоконные каналы в универсальном кабеле. Такой способ позволит избежать искажений при передаче сигнала и даст возможность максимально увеличить объем передающейся информации. В частности, это дает возможность на мониторах ПЭМа реализовать концепцию высокой четкости и бинокулярного отображения в системе виртуальной реальности.
Кроме кабеля, для связи с лидером в качестве резерва, должна быть предусмотрена радиосвязь. Универсальный кабель от ПЭМа к лидеру кроме информационной должен выполнять следующие функции - силовую и энергетическую. Силовая составляющая кабеля (центральный трос) при неожиданном сваливании лидера в глубокий марсианский кратер или при проваливании в скрытую наносами трещину позволит ПЭМу удержать лидера на весу с последующим извлечением автоматической лебедкой.
Важно то, что масса лидера почти на два порядка меньше массы ПЭМа. При невозможности извлечения лидера (из трещины) он должен легко автоматически отсоединяться (отстреливаться). Энергетическая составляющая кабеля должна позволить осуществить постоянное энергопитание (и подзарядку аккумуляторов) лидера от ПЭМа. Автономное энергопитание лидера (от собственных аккумуляторов) должно осуществляться, в частности, в нештатной или чрезвычайной ситуации, когда необходимо перевезти экипаж терпящего бедствие ПЭМа (4 человека) до убежища или исправного ПЭМа на расстояние до 10 км. В этом случае выдвигаются кресла, экипаж размещается на них, производится отсоединение кабеля и лидер выполняет функции ровера, используемого американцами в пилотируемых экспедициях на Луне.
В целях предотвращения повреждения кабеля при трении о грунт следует использовать его в подвешенном состоянии. Для этого надо использовать специальный гибкий рычаг, крепящийся на водительской кабине ПЭМа. Рычаг имеет некоторую аналогию «удилища» (спиннинга). Здесь кабель выполняет функцию лески «спиннинга». Длина и натяжение кабеля должны автоматически регулироваться с таким расчетом, чтобы он практически не касался грунта во время движения лидера и ПЭМа по маршруту.
Рычаг в месте крепления может перемещаться в горизонтальной плоскости в пределах 360 градусов. В вертикальной плоскости должен подниматься и опускаться в пределах 60 градусов. На конце рычага устанавливается специальное захватывающее устройство, регулирующее травление троса. На лидере трос перед креплением к корпусу взаимодействует с манипулятором, способным произвести соединение (штепсель-замок) троса с лидером и поднять трос выше рядом стоящего ПЭМа (до зацепления троса захватывающим устройством рычага ПЭМа). Вот такая «овчарка» (лидер) будет бегать на «поводке» впереди «пограничника» (ПЭМа) по Марсу, обеспечивая безопасность экспедиции.
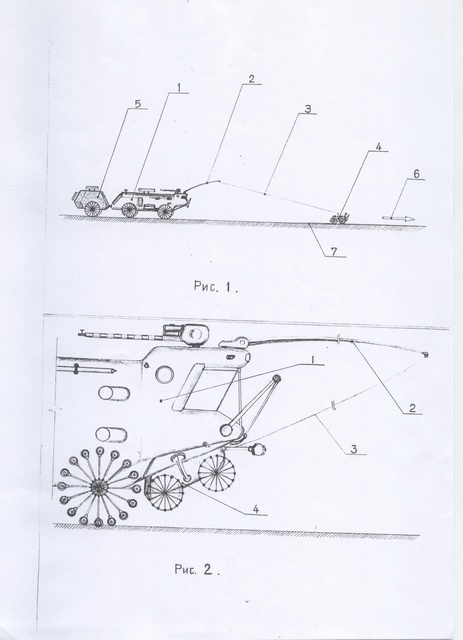
Рис.1. Использование ЛИДЕРА в условиях передвижения экспедиции.
Рис.2. ЛИДЕР в пристыкованном положении к ПЭМ.
Условные обозначения.
1). Пилотируемый экспедиционный марсоход (ПЭМ).
2). Гибкий рычаг («спиннинг»).
3). Кабель-трос, связующий ЛИДЕР и ПЭМ.
4). ЛИДЕР.
5). Ядерный энергоисточник ПЭМа на прицепе.
6). Направление движения
Поскольку формат статьи ограничен в объеме - нет возможности дать сколь-нибудь значительное описание проработанных (с большей детализацией чем по лидеру) конструктивных решений на тему пилотируемых экспедиционных автотранспортных средств. Ограничимся лишь кратким перечнем. Среди множества технических решений, касающихся конструкции марсоходов и особенностей их эксплуатации достойны упоминания следующие:
- кострукция и особенности эксплуатации ПЭМа;
- ходовая часть ПЭМа ( уникальное колесо-трансформер с бстроизменяемым диаметром и встроенными электромоторами) адаптированная к марсианским условиям;
- ядерный энергоисточник для ПЭМа и особенности эксплуатации в марсианских условиях;
- резервное энергопитание от пленочных солнечных батарей (убираемых в кассеты);
- противоопрокидывающая система безопасности;
- противоразгерметизационный автотомпанаж;
- применение робототехнических средств;
- использование электромагнитной пушки для дистанционного спектрографирования образцов марсианского грунта;
- методика и технические средства сейсмозондирования Марса;
- тросовая система преодоления марсоходами крупных трещин и крутых склонов (обрывов);
- конструкция и особенности эксплуатации автоматического грузового марсохода (АГМ), сопровождающего ПЭМ;
- конструкция и особенности использования автоматизированной буровой установки размещаемой на АГМе;
- конструкция и особенности отсека экипажа на ПЭМе;
- конструкция и особенности шлюзового отсека ПЭМа;
- конструкция и особенности лабораторного отсека ПЭМа;
- регламенты действий экспедиции (перемещения одиночного и в составе колонны, временной стоянки, научных исследований, стоянки на месте постоянного базирования);
- регламенты аварийно спасательных работ.
Таков краткий перечень технических решений только по блоку марсианских экспедиционных автотранспортных средств. При достаточном интересе у научно-технической общественности все перечисленное можно опубликовать в серии статей. Можно опубликовать изложение и остальных блоков по марсианской тематике. Надо сказать, что большое число технических решений подлежит патентованию.
В заключение необходимо подчеркнуть следующее. Весь обозначенный массив «марсианских» наработок может обеспечить, при реализации, пионерное освоение Марса. Если же вести речь о действительной колонизации Марса, то надо выходить на принципиально новый (более высокий) технический уровень. В этом случае неизбежно привлечение таких концептуальных решений, как инерционный (кавитационный) термоядерный синтез (см. патент № 2125303), магнитоплазменную систему вывода в космос полезных грузов (см. патент № 2134650) и, особенно, концепцию кибернетической реплицирующей квазиорганической субстанции на множестве унифицированных модулей (см. В.А. Золотухин «Колонизация космоса: проблемы и перспективы», Тюмень , ТГУ, 2003г.).
При реализации этих концепций станет, возможна колонизация не только Марса, но и многих других объектов Солнечной системы (включая терраформинг планет).
Тем не менее, начинать следует с указанных в данной статье технических решений.
ЛИТЕРАТУРА:
1. Бубнов И. Н., Каманин Л. Н. Обитаемые космические станции. М.: Воениздат, 1964.
2. Григорьев В. И., Мякишев Г. Я. Силы в природе. М.: Наука, 1977.
3. Загадки звездных островов / Сост. Ф. С. Алымов. Кн. 1-6. М.: Молодая гвардия, 1982-1990.
4. Игумнов В. И. К далеким мирам. М.: Военное изд. мин. обороны СССР, 1965.
5. Киселев С. П. Ракета в воздушном океане. М.: Машиностроение, 1974.
6. Колпаков П. Е. Основы ядерной физики. М.: Просвещение, 1969.
7. Космонавтика. Малая энциклопедия / Под ред. В. П. Глушко. М.: Советская энциклопедия, 1970
8. Кролл Н., Травелпис А. Основы физики плазмы / Пер. с англ. М.: Мир, 1975.
9. Кузнецов В. А. Ядерные реакторы космических энергетических установок. М.: Атомиздат, 1977
10. Левантовский В. И. Механика космического полета в элементарном изложении. М.: Наука, 1974
11. Левантовский В. И. Механика полета к далеким планетам. М.: Знание, 1974.
12. Маров М. Я. Планеты Солнечной системы. М.: Наука, 1981.
13. Мовчан Ю. И. Физика и путь в космос. М.: Высшая школа, 1971.
14. Морохов И. Д. и др. Атомная наука и техника в СССР. М.: Атомиздат, 1977.
15. Ораевский В. Н. Плазма на Земле и в космосе. Киев: Наукова думка, 1974.
16. Петерсон Э. С. Атомная энергия в космосе / Пер. с англ. М.: Атомиздат, 1967.
17. Покровский Г. И. Архитектура в космосе. М.: Наука, 1972.
18. Твердовский В. Н. Космодром. М.: Машиностроение, 1976.
19. Уманский С. П. Человек в космосе. М.: Военное изд. мин. обороны СССР, 1970
20. Урсул А. Д. Человечество, Земля, Вселенная: филосовские проблемы космонавтики. М.: Мысль, 1977.
21. Циолковский К. Э. Цели звездоплавания. М.: АНСССР, 1960.









